| Тип |
Компьютер |
|---|---|
| Действует ли гравитация |
Нет |
| Прозрачность |
Нет |
| Светимость |
Нет |
| Взрывоустойчивость | |
| Прочность | |
| Инструмент |
|
| Возобновляемый |
Нет |
| Складываемый |
Нет |
| Воспламеняемый |
? |
| Первое появление |
1.0 |
Роботы, в отличие от стационарных компьютеров, имеют возможность перемещаться по миру и взаимодействовать с ним. В то же время, они не могут взаимодействовать с внешними компонентами.
Если вам необходимо установить связь с компьютером, или другим роботом, используйте беспроводную сетевую плату, или создайте низкоуровневый протокол для связи через сеть красного камня, при помощи красной платы.
При работе, робот расходует энергию своего аккумулятора. Любое действие тратит определённое количество энергии. Точные значения энергопотребления установлены в разделе opencomputers.power.cost файла конфигурации.
Существует два способа восполнения заряда аккумуляторов: при помощи зарядного устройства или апгрейдов: солнечной панели и генератора.
При наличии апгрейда-опыта, робот в процессе работы, например — добычи руды, получает очки опыта. По мере накопления опыта робот повышает свой уровень. Чем выше уровень робота, тем быстрее он выполняет команды и двигается, и меньше изнашивает инструмент. (См. раздел opencomputers.robot.xp файла конфигурации.)
Создание робота[]

.png){kind=link}
Интерфейс сборщика роботов.
Для настройки и создания нового робота используется Сборщик роботов. Он позволяет подобрать комплектующие в соответствии с будущей задачей робота.
При создании вы можете использовать любые компьютерные комплектующие и апгрейды. Кроме того на робота можно установить до трех контейнеров для сменных плат или апгрейдов.
Если вы собираетесь установить на робота какие-либо программы, не забудьте добавить в конструкцию жёсткий диск. Вы можете установить операционную систему на него, или добавить в конструкцию дискету с операционной системой. В таком случае, робот будет обладать дополнительной файловой системой, с которой будет загружаться.
Крафт[]
До версии 1.3[]
| Ингредиенты | Процесс |
|---|---|
| Оперативная память (Уровень 1) + Корпус компьютера (Уровень 1) + Видеокарта (Уровень 1) + Дисковод + Аккумулятор + Раздатчик + Монитор (Уровень 1) + Вагонетка с воронкой |
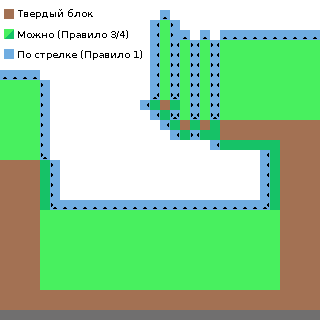
Движение робота[]
.png){kind=link}
Правила передвижения робота
В версии OpenComputers 1.5.0, правила согласно которым робот движется в воздухе, были изменены. Теперь они выглядят так:
- Робот может двигаться, только если стартовая или конечная точки корректны.
- Позиция под роботом всегда корректна. (Если там нет твердого блока.)
- Позиции до
<flightHeight>вверх от твердого блока корректны. - Любая позиция вплотную к стороне твердого блока — корректна (то есть роботы могут двигаться «по стенке»).
Параметр <flightHeight> задается в конфигурации мода, и по умолчанию равен 8 блокам.
Для того, чтобы робот мог подниматься выше этого предела, установите в него апгрейд высоты полета.
Установка операционной системы[]
Для того чтобы работать с программами, робот должен обладать операционной системой. Вы можете внести дискету с операционной системой в конструкцию робота при сборке, либо снабдить его жёстким диском и после сборки установить на него систему вручную. Для этого в конструкции робота должен быть дисковод.
Если вы выбрали второй способ, сделайте следующее.
Вставьте в дисковод робота дискету с OpenOS и включите его. После того, как робот загрузится, введите в командную строку install.
Программа выведет нумерованный список жёстких дисков и предложит выбрать один из них для установки системы. Если вы не дали жёсткому диску отдельного названия (см. Туториал: Работаем с дисками) он будет отображен в списке своим адресом.
Введите номер того диска, на который планируете установить операционную систему.
Программа-установщик скопирует необходимые файлы с дискеты (скорость установки системы зависит от мощности собранного вами робота). После этого вам будет предложено перезагрузить систему. Введите y (подтверждение). Теперь вы можете вынуть дискету из дисковода.
После установки системы, на жёстком диске появится ряд папок и файл init.lua, который отвечает за загрузку операционной системы при запуске робота.
Использование[]
При сборке робота его аккумулятор заряжается на 50 %. Для дозарядки поместите готового робота возле зарядного устройства (не забудьте подать на устройство сигнал редстоуна, силой этого сигнала регулируется скорость зарядки робота).
Клик правой кнопки мыши откроет интерфейс робота. Здесь располагается дисплей робота (если он был добавлен при сборке), индикатор топлива, его инвентарь (активный слот отмечен зелёным прямоугольником) и слоты для инструмента, дискеты и апгрейдов.
Программы для робота удобнее писать на компьютере, затем переносить в робота на дискете. Сам робот может обладать только небольшим экраном первого уровня, что делает написание кода несколько неудобным.
Туториалы[]
Программы для робота[]
Функции[]
Программы для роботов используют специальный программный интерфейс:
См. также События робота.
История версий[]
- До версии OpenComputers 1.3 роботы имели фиксированную конфигурацию и создавались на верстаке по рецепту (см. выше).
- Начиная с версии 1.5 была изменена логика полета робота (см. выше).